1. Introduction
Due to non-local and historical memory properties of fractional order system (FOS), it has been widely studied by many researchers, see
| [1] | W. Bauer, J. Baranowski, Fractional PIλD controller design for a magnetic levitation system, Electronics 9 (2020) paper no 2135, 15 pages. |
| [2] | K. Oprzedkiewicz, M. Rosol, J. Zeglen-Wlodarczyk, The magnetic levitation system implementation of fractional-order PID controller, Electronics 10 (2021) paper no 524, 16 pages. |
| [3] | C. I. Muresan, I. R. Birs, E. H. Dulf, D. Copot, L. Miclea, A review of recent advances in fractional-order sensing and filtering techniques, Sensors 21 (2021) paper no 5920, 26 pages. |
| [4] | P. Torvik, R. Bagley, On the appearance of the fractional derivative in the behavior of real materials, J. Appl. Mech. 51 (1984) 294-298. |
| [5] | J. Wang, L. Zhang, D. Xu, P. Zhang, G. Zhang, A simplified fractional order equivalent circuit model and adaptive online parameter identification method for Lithium-ion batteries, Mathematical Problems in Engineering 2019 (2019), 8 pages. https://doi/10.1155/2019/6019236 |
| [6] | L. Li, H. Zhu, A. Zhou, M. Hu, C. Fu, D. Qin, A novel online parameter identification algorithm for fractional-order equivalent circuit model of Lithium-ion batteries, Int. J. Electrochem. Sci. 15 (2020) 6863-6879. |
| [7] | V. Erturk, P. Kumar, Solution of a COVID-19 model via new generalized Caputo-type fractional derivatives, Chaos, Solitons and Fractals 139 (2020).
https://doi.org/10.1016/j.chaos.2020.110280 |
[1-7]
. See also books
| [8] | V. V. Uchaikin, Fractional Derivatives for Physicists and Engineers: Volume I. Background and Theory, Nonlinear Physical Science, Higher Education Press and Springer-Verlag, Beijing and Berlin, 2013. |
| [9] | R. Hilfer, Applications of Fractional Calculus in Physics, World Scientific, Singapore, 2000. |
| [10] | S. Das, Functional Fractional Calculus for System Identification and Controls, Springer-Verlag, Berlin, Heidelberg, 2008. |
[8-10]
.
The time delay is one of the natural problem in the practical engineering applications. FOSs with time delays can be found in various engineering systems such as chemical process, nuclear reactor, and the dynamic behavior of HIV infection of
T-cells, see
| [11] | Y. Tang, N. Li, M. Liu, Y. Lu, W. Wang, Identification of fractional-order systems with time delays using block pulse functions, Mechanical Systems and Signal Processing 91 (2017) 382-394. http://dx.doi.org/10.1016/j.ymssp.2017.01.008 |
[11]
. In practice, FOSs with state delays arise from the dynamic behavior of viscoelastic materials, dynamical processes in self-similar and porous structures, control theory of mechanical system, strongly porous materials, some amorphous semiconductors, see
| [12] | A. Si-Ammour, S. Djennoune, M. Bettayeb, A sliding mode control for linear fractional systems with input and state delays, Communications in Nonlinear Science and Numerical Simulation 14 (2009) 2310-2318.
https://doi.org/10.1016/j.cnsns.2008.05.011 |
| [13] | A. Azami, S. V. Naghavi, R. D. Tehrani, M. H. Khooban, F. Shabaninia, State estimation strategy for fractional order systems with noises and multiple time delayed measurements, IET Sci. Meas. Technol. 11 (2017) 9-17.
https://doi.org/10.1049/iet-smt.2016.0089 |
| [14] | J. Si, W. Jiang, Sliding mode control for fractional differential systems with state-delay, Chin. Quart. J. Math. 27(2012) 117-122. |
| [15] | X. Li, S. Yurkovich, Sliding mode control of delayed systems with application to engine idle speed control, IEEE Trans. Cont. Syst. Tech. 9 (2001) 802-810. |
| [16] | S. Balochian, A. K. Sedigh, A. Zare, Stabilization of multi-input hybrid fractional-order systems with state delay, ISA Transactions 50 (2011) 21-27.
https://doi.org/10.1016/j.isatra.2010.10.007 |
| [17] | P. Lanusse, H. Benlaoukli, D. Nelson-Gruel, A. Oustaloup, Fractional-order control and interval analysis of siso systems with time-delayed state, IET Control Theory Appl. 2 (2008) 16-23. https://doi.org/10.1049/iet-cta:20060491 |
| [18] | Z. H. Wang, Y. G. Zheng, The optimal form of the fractional-order difference feedbacks in enhancing the stability of a sdof vibration system, Journal of Sound and Vibration 326 (2009) 476-488. |
[12-18]
. In particular, they arise from communication lags, feedback delay in measurement, delay in closed loop systems. In
| [17] | P. Lanusse, H. Benlaoukli, D. Nelson-Gruel, A. Oustaloup, Fractional-order control and interval analysis of siso systems with time-delayed state, IET Control Theory Appl. 2 (2008) 16-23. https://doi.org/10.1049/iet-cta:20060491 |
[17]
, the authors studied the control problem of SISO system which is presented as FOS with state delay when there exists a time delay in the state feedback loop. In
| [18] | Z. H. Wang, Y. G. Zheng, The optimal form of the fractional-order difference feedbacks in enhancing the stability of a sdof vibration system, Journal of Sound and Vibration 326 (2009) 476-488. |
[18]
, the authors use the control signal composed of state delay signals to stabilize the vibration system of single degree of freedom. The stabilization of FOSs is greatly affected by state delay, see
| [13] | A. Azami, S. V. Naghavi, R. D. Tehrani, M. H. Khooban, F. Shabaninia, State estimation strategy for fractional order systems with noises and multiple time delayed measurements, IET Sci. Meas. Technol. 11 (2017) 9-17.
https://doi.org/10.1049/iet-smt.2016.0089 |
| [16] | S. Balochian, A. K. Sedigh, A. Zare, Stabilization of multi-input hybrid fractional-order systems with state delay, ISA Transactions 50 (2011) 21-27.
https://doi.org/10.1016/j.isatra.2010.10.007 |
[13, 16]
. So this is an important non-negligible factor in the construction of model for FOS with state delay.
Because of the lack of acceptable geometric or physical explanations of fractional calculus, the identification for FOSs has been the best approach for building fractional order models of physical systems.
It is well known that the time domain identification method is one of the identifications of FOSs. This is based on the minimization of both equation error and output error and hence several least square algorithms have been used. For example, we refer to a recursive error prediction approach
| [19] | R. Behinfaraz, M. Badamchizadeh, A. R. Ghiasi, An adaptive method to parameter identification and synchronization of fractional-order chaotic systems with parameter uncertainty, Appl. Math. Model. 40 (2016) 4468-4479. |
[19]
, modulating function method
| [20] | Z. Gao, X. Lin, Y. Zheng, System identification with measurement noise compensation based on polynomial modulating function for fractional-order systems with a known time-delay, ISA Transactions 79 (2018) 62-72.
https://doi.org/10.1016/j.isatra.2018.04.012 |
| [21] | Y. Dai, Y. Wei, Y. Hu, Y. Wang, Modulating function-based identification for fractional order systems, Neurocomputing 173 (2016) 1959-1966.
http://dx.doi.org/10.1016/j.neucom.2015.07.002 |
[20, 21]
, Haar wavelet-based method
| [22] | K. Kothari, U. Mehta, J. Vanualailai, A novel approach of fractional-order time delay system modeling based on Haar wavelet, ISA Transactions 80 (2018) 371-380.
https://doi.org/10.1016/j.isatra.2018.07.019 |
| [23] | K. Kothari, U. Mehta, V. Prasad, J. Vanualailai, Identification scheme for fractional Hammerstein models with the delayed Haar wavelet, IEEE/CAA journal of automatica sinica 7 (2020) 1-10. https://doi.org/10.1109/JAS.2020.1003093 |
[22, 23]
, Block pulse functions (BPFs)-based method
| [11] | Y. Tang, N. Li, M. Liu, Y. Lu, W. Wang, Identification of fractional-order systems with time delays using block pulse functions, Mechanical Systems and Signal Processing 91 (2017) 382-394. http://dx.doi.org/10.1016/j.ymssp.2017.01.008 |
| [24] | Y. Tang, H. Liu, W. Wang, Q. Lian, X. Guan, Parameter identification of fractional order systems using block pulse functions, Signal Process. 107 (2015) 272-281. |
| [25] | Lu, Y. Tang, X. Zhang, S. Wang, Parameter identification of fractional order systems with nonzero initial conditions based on block pulse functions, Measurement 158 (2020).
https://doi.org/10.1016/j.measurement.2020.107684 |
| [26] | V. Prasad, U. Mehta, Modeling and parametric identification of Hammerstein systems with time delay and asymmetric dead-zones using fractional, differential equations, Mechanical Systems and Signal Processing 167 (2022).
https://doi.org/10.1016/j.ymssp.2021.108568 |
| [27] | M.-H. Sin, C. Sin, S. Ji, S.-Y. Kim, Y.-H. Kang, Identification of fractional-order systems with both nonzero initial conditions and unknown time delays based on block pulse functions, Mechanical Systems and Signal Processing 169 (2022). https://doi.org/10.1016/j.ymssp.2021.108646 |
| [28] | Myong-Hyok Sin, Chol Min Sin, Hyang-Yong Kim, Yong-Min An, Kum-Song Jang, Parameter identification of fractional-order systems with time delays based on a hybrid of orthonormal Bernoulli polynomials and block pulse functions, Nonlinear Dyn (2024) 112: 15109-15132.
https://doi.org/10.1007/s11071-024-09703-8 |
[11, 24-28]
.
Due to the simplicity of BPFs, the identification method using BPFs has been considered as an effective one to avoid the complicated and costly computations of the fractional derivatives of input and output signals.
In
| [11] | Y. Tang, N. Li, M. Liu, Y. Lu, W. Wang, Identification of fractional-order systems with time delays using block pulse functions, Mechanical Systems and Signal Processing 91 (2017) 382-394. http://dx.doi.org/10.1016/j.ymssp.2017.01.008 |
[11]
, to identify FOS with input delay, the fmincon function in MATLAB optimization toolbox was used to solve the optimization problem for determining both linear and nonlinear parameters. In the paper, the identification accuracy is sensitively varied according to the change of initial value. In general, the identification method for the linear continuous FOS which can estimate the linear and nonlinear parameters individually is considered as an efficient one having the independence of identification accuracy to initial condition and reducing the amount of work. In the context, we proposed an efficient identification method for FOS with both nonzero initial value and time delay, in which the linear and nonlinear parameters are individually estimated
| [28] | Myong-Hyok Sin, Chol Min Sin, Hyang-Yong Kim, Yong-Min An, Kum-Song Jang, Parameter identification of fractional-order systems with time delays based on a hybrid of orthonormal Bernoulli polynomials and block pulse functions, Nonlinear Dyn (2024) 112: 15109-15132.
https://doi.org/10.1007/s11071-024-09703-8 |
[28]
.
Within our knowledge, for FOSs with state delay there seems to be no work concerning parameter identification method in which linear and nonlinear parameters are individually estimated. So the aim of this paper is to develop such an identification method for FOSs with unknown state and input delays. The main novelty is to derive a new method, by which the linear and nonlinear parameters are separably estimated by using the commutativity and nilpotent property of the fractional integral operational matrix (FIOM) of BPFs. Moreover, we propose an efficient algorithm based on a new approximation about the Jacobian of variable projection functional for solving the least squares method for nonlinear parameters. With the estimated nonlinear parameters, we use the bias compensated recursive least squares (BCRLS) method in order to reduce the amount of work and get a high accuracy in the identification of linear parameters.
Simulation results show that in the proposed methods the unknown state and input delays, coefficients are efficiently identified.
The paper consists of 5 sections. In section 2, we give the definitions of fractional calculus, BPFs and explain the commutativity and nilpotent property of the FIOM of BPFs, which is upper triangular Toeplitz. Section 3 is devoted to construction of a separable recursive model for FOSs with unknown state and input delays, and of a method in which the least square problem including all parameters is projected onto the one only including nonlinear parameters, i.e., state and input delays. In section 4, we give some simulation examples for verifying the effectiveness of the proposed method. Section 5 concludes this paper.
2. Preliminaries
2.1. Definitions of the Fractional Order Integral and Derivative
The Riemann-Liouville fractional order integral is defined by
(1)
where,is the integral interval andis the Gamma function, that is,.
For the sake of simplicity, we setand denoteby.
Let. Then the Riemann-Liouville fractional order derivative is defined as
(2)
2.2. The FIOM of BPFs
As in
, a set of BPFs in the semi-open interval
is defined by
(3)
where, andis the number of BPFs in the set.
We callby block pulse vector. If we define the elements ofby
then any absolute integrable function defined on intervalcan be approximated by a linear combination of BPFs as follow:
(4)
(5)
where the symbol
means convolution. In
| [30] | M. Behroozifar, S. Yousei, Numerical solution of delay differential equations via operational matrices of hybrid of block-pulse functions and Bernstein polynomials, Comput. Methods Diff. Eq. 1 (2013) 78-95. |
[30]
, it was shown that Eq. (
5) can be represented as
where
(7)
We call the matrix
by FIOM for BPFs. By Eqs. (
4), (
6), the fractional order integral of the function
is given by
2.3. Commutativity and Nilpotent Property of the FIOM
By Eq. (
4), the function
is expanded by BPFs as follow:
(9)
where
(10)
In
| [11] | Y. Tang, N. Li, M. Liu, Y. Lu, W. Wang, Identification of fractional-order systems with time delays using block pulse functions, Mechanical Systems and Signal Processing 91 (2017) 382-394. http://dx.doi.org/10.1016/j.ymssp.2017.01.008 |
[11]
, it was pointed out that for
, the delayed function
is represented as
(11)
where for the Kronecker delta function
(12)
The matrix
is called
order delay operational one. In
| [28] | Myong-Hyok Sin, Chol Min Sin, Hyang-Yong Kim, Yong-Min An, Kum-Song Jang, Parameter identification of fractional-order systems with time delays based on a hybrid of orthonormal Bernoulli polynomials and block pulse functions, Nonlinear Dyn (2024) 112: 15109-15132.
https://doi.org/10.1007/s11071-024-09703-8 |
[28]
, it was shown that for non-negative integers
,
(13)
As in
| [11] | Y. Tang, N. Li, M. Liu, Y. Lu, W. Wang, Identification of fractional-order systems with time delays using block pulse functions, Mechanical Systems and Signal Processing 91 (2017) 382-394. http://dx.doi.org/10.1016/j.ymssp.2017.01.008 |
[11]
, the Riemann-Liouville fractional order integral
is rewritten as
(14)
By Eq. (
12), the FIOM from Eq. (
7) is decomposed into
(15)
From Eq. (
15), we can see that the FIOM from Eq. (
7) is upper triangular Toeplitz which belongs to the subspace
.
Next, let us consider the commutativity of FIOMs. In the Appendix A below, we show the following properties: for any two FIOMs,and,
(16)
In
| [31] | J. J. More, The Levenburg-Marquardt Algorithm: Implementation and Theory, Springer-Verlag, New York, 1977. |
[31]
, it was shown that if a matrix
belongs to the strict upper triangular Toeplitz space
, then
is nilpotent. Indeed, if
, then by (
13) for all
Remark 1
Eq. (17) is the main key in the transformation of identification of FOS with state delay onto the separable least square problem. In particular, by Eqs. (16) and (17), we get that forand,(18)
For more detail, we refer to Appendix B.
3. Identification Algorithm for FOSs with Unknown State and Input Delays
Here we construct a new identification algorithm for FOSs with unknown state and input delays using separable least square problem. At first, the identification method is proposed for FOS from
| [14] | J. Si, W. Jiang, Sliding mode control for fractional differential systems with state-delay, Chin. Quart. J. Math. 27(2012) 117-122. |
[14]
and then for FOS from
| [12] | A. Si-Ammour, S. Djennoune, M. Bettayeb, A sliding mode control for linear fractional systems with input and state delays, Communications in Nonlinear Science and Numerical Simulation 14 (2009) 2310-2318.
https://doi.org/10.1016/j.cnsns.2008.05.011 |
| [13] | A. Azami, S. V. Naghavi, R. D. Tehrani, M. H. Khooban, F. Shabaninia, State estimation strategy for fractional order systems with noises and multiple time delayed measurements, IET Sci. Meas. Technol. 11 (2017) 9-17.
https://doi.org/10.1049/iet-smt.2016.0089 |
| [16] | S. Balochian, A. K. Sedigh, A. Zare, Stabilization of multi-input hybrid fractional-order systems with state delay, ISA Transactions 50 (2011) 21-27.
https://doi.org/10.1016/j.isatra.2010.10.007 |
[12, 13, 16]
.
3.1. Case 1
Let us consider the FOS from
| [14] | J. Si, W. Jiang, Sliding mode control for fractional differential systems with state-delay, Chin. Quart. J. Math. 27(2012) 117-122. |
[14]
(19)
whereandis the number of BPFs andis the simulation time, and,,,are input signal, state, output signal and the Gauss white noise, respectively.
From Eqs. (
8) and (
14) the first equation in Eq. (
19) can be rewritten as
(20)
By Eq. (
18), the matrix
with
is the following:
(21)
Inserting Eq. (
21) into Eq. (
20) implies that
(22)
Now we set
If
, then by the previous notation Eq. (
22) can be rewritten as
where
(24)
Remark 2
In the estimation of the nonlinear parameter, foror, only the first up toelements in Eq. (24) can be non-zero. The greaterand, the smaller the amount of work.By Eq. (
24) the data matrix
for
sampling points can be written as
where
(26)
Then by Eqs. (
25) and (
26) the identification for (
19) is reduced to the separable least square problem as
(27)
whereis sampling value vector for.
3.2. Case 2
Let us consider the FOS from
| [12] | A. Si-Ammour, S. Djennoune, M. Bettayeb, A sliding mode control for linear fractional systems with input and state delays, Communications in Nonlinear Science and Numerical Simulation 14 (2009) 2310-2318.
https://doi.org/10.1016/j.cnsns.2008.05.011 |
| [13] | A. Azami, S. V. Naghavi, R. D. Tehrani, M. H. Khooban, F. Shabaninia, State estimation strategy for fractional order systems with noises and multiple time delayed measurements, IET Sci. Meas. Technol. 11 (2017) 9-17.
https://doi.org/10.1049/iet-smt.2016.0089 |
| [16] | S. Balochian, A. K. Sedigh, A. Zare, Stabilization of multi-input hybrid fractional-order systems with state delay, ISA Transactions 50 (2011) 21-27.
https://doi.org/10.1016/j.isatra.2010.10.007 |
[12, 13, 16]
(28)
where,,,are the same as in the FOS (19).
From Eq. (
8) we can rewrite Eq. (
28) as
Hence
(29)
From (18) and Appendix C, the matrixwithcan be rewritten as
(30)
where. Onceis known, the matrixis represented as
Remark 3 If, then the convergence of proposed algorithm is guaranteed with increase of the number of BPFs. If, then in Appendix C we can setand modify the algorithm.
Inserting (
30) into (
29) implies that
(31)
If
, in Eq. (
31), then
is the linear parameter and
the nonlinear parameter. Then Eq. (
31) can be rewritten as
where
(33)
By Eq. (
32) the data matrix
for
sampling points can be rewritten as
where
(35)
Thus from Eqs. (
31) and (
34) the identification for the FOS (
28) is reduced to the separable least square problem
(36)
whereis the sampling value vector of.
3.3. Identification Algorithm
3.3.1. Identification Algorithm for Nonlinear Parameter
As we can see in Eqs. (
27) and (
36), the identifications for FOSs (
19) and (
28) with both state and input delays are reduced to the separable least square problem.
As
| [32] | G. Golub, V. Pereyra, The differentiation of pseudo-inverses and nonlinear least squares problems whose variable seperate, SIAM J. Numer. Anal. 10 (1973) 413-432.
http://www.jstor.org/stable/2156365 |
[32]
, given the nonlinear parameter
, the solution of the optimization problem (
27) and (
36) for obtaining the linear parameters is
whereis Moore-Penrose pseudo-inverse.
Inserting Eq. (
37) into Eq. (
27) or (
36) yields that we have the following optimization for nonlinear parameter
:
whereand
is a variable projection functional.
The matrix
needs the inverse matrix
. However, the matrix
can be singular. To solve the problem, we follow the argument from
| [28] | Myong-Hyok Sin, Chol Min Sin, Hyang-Yong Kim, Yong-Min An, Kum-Song Jang, Parameter identification of fractional-order systems with time delays based on a hybrid of orthonormal Bernoulli polynomials and block pulse functions, Nonlinear Dyn (2024) 112: 15109-15132.
https://doi.org/10.1007/s11071-024-09703-8 |
[28]
.
If the matrixsatisfies
(40)
then the matrix
from (
38) can be rewritten as
Here the matrixcan be obtained as follow: if, then the matrixis decomposed as
whereandhas normally orthonormal column vectors. Then the matrix
satisfies Eq. (
40). Setting
, we have
Thus Eq. (
38) is represented as
As pointed out in
| [28] | Myong-Hyok Sin, Chol Min Sin, Hyang-Yong Kim, Yong-Min An, Kum-Song Jang, Parameter identification of fractional-order systems with time delays based on a hybrid of orthonormal Bernoulli polynomials and block pulse functions, Nonlinear Dyn (2024) 112: 15109-15132.
https://doi.org/10.1007/s11071-024-09703-8 |
[28]
, the matrix
consists of the first linear independent
column vectors which are obtained by orthonormalizing
by virtue of Gram-Schmidt orthogonalization.
In order to identify the nonlinear parameter based on Levenberg-Marquardt (LM) algorithm from
| [31] | J. J. More, The Levenburg-Marquardt Algorithm: Implementation and Theory, Springer-Verlag, New York, 1977. |
[31]
, we have to construct the Jacobian for the cost functional (
44).
Remark 4 In this paper, we propose a new construction of Jacobian of variable projection functional, in which the matrixis no longer used.
To this end, we first calculate the Jacobian of variable projection functional
from (
39). If
for
or 3, then we have for
As
| [33] | L. Kaufman, A variable projection method for solving separable nonlinear least squares problems, BIT 15 (1975) 49-57. |
[33]
we can neglect the term
in the previous formula. This enables us to reduce the amount of work without a great affection about the approximation accuracy of Jacobian. By (
43) we have
(45)
Since
by (
40) and (
41), we have
Moreover,can be obtained as follow: for the case 1 with
(47)
while for the case 2 with
(48)
where
By Eqs. (
47) and (
48) the algorithm for determining the nonlinear parameter
is constructed as follow:
[Algorithm 1]
Step 1: Setand select the initial pointand admissible error.
Step 2: Setand determine the scrutiny directionas
where
is error function,
damping factor. The Jacobian
is determined by Eq. (
45) as
wherefor the case 1, whilefor the case 3. The step sizeis determined by.
Step 3: If, then we setand if not, then go to step 2 with.
3.3.2. Identification Algorithm for Linear Parameters
If the nonlinear parameter
is estimated by algorithm 1, the linear parameter
can be estimated by Eq. (
37).
Remark 5
As mentioned above, the matrixdoes not exist if. Moreover, it is pointed out in that even though, the linear parameter estimated by Eq. (37) has a deviation when there exists an output noise. Furthermore, increase of the number of BPFs yields increase of the number of the linear parameters, which makes it impossible for us to calculate them. Hence we use BCRLS method from .We selectas sampling times and introduce the notations
(49)
Then the FOS (
19) or (
28) can be rewritten as
whereare the already estimated nonlinear parameters.
For the FOS (19), we have
(51)
and while for the FOS (
28)
(52)
Then the BCRLS for estimating linear parameters is the following:
[Algorithm 2]
(53)
whereandis a very large parameter which usually has the size ofand.
4. Simulation Examples
Example 1
We consider
(54)
whereandis the Gauss white noise. The simulation time is.
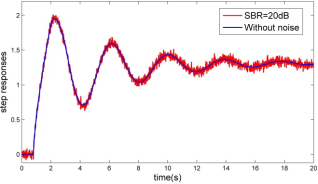
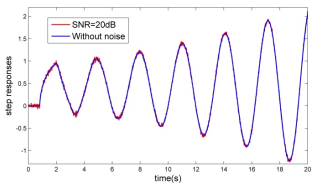
Figure 1 shows the step response for the FOS (54) with noise or without noise.
Figure 1. The Step Response for Example 1.
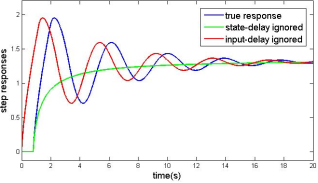
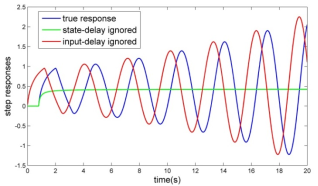
To show the dependence of output response to input or state delays, we present
Figure 2.
Figure 2. The Step Response for Example 1 with Ignored State or Input Delay.
As we can see in
Figure 2, the output response for the system with ignored state delay is greatly different from real response than the one for the system with ignored input delay. This shows that the state delay is an important non-negligible factor.
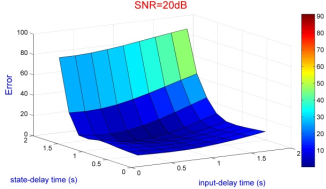
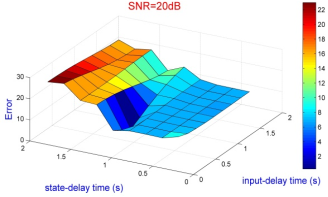
Figure 3 shows the error function (44) for the FOS (54) without noise or with noise
, in which the errors for state delay
and input delay
is presented in the range of
.
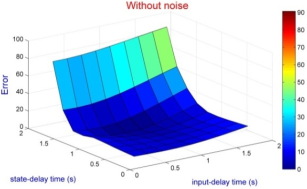
Figure 3. The Error Function for FOS (54).
Table 1 lists the identification results of nonlinear parameters
for the FOS (51) with noise or without noise. Here the algorithm 1 is used.
Table 1. Identification Results of Nonlinear Parameters for Example 1.
nonlinear parameter | true(s) | without noise | with noise (SNR) |
10dB | 20dB |
state delay time | 1.2 | 1.2000 | 1.2000 | 1.2000 |
input delay time | 0.8 | 0.8000 | 0.8000 | 0.8000 |
Table 1 shows that if the state and input delay times are integer times of the sampling interval
, then there does not exist the identification error for nonlinear parameters.
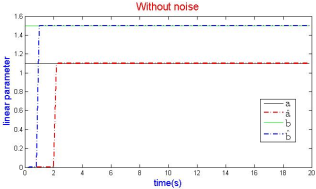
Based on this identification result, we can estimate the linear parameters. Here we use algorithm 2.
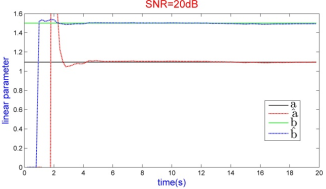
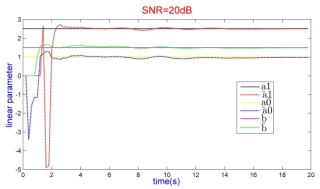
In
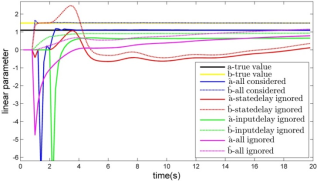
Figure 4, the online identification process of linear parameters for the FOS (54) with noise or without noise is presented.
Table 2 shows the identification result according to various noise and numbers of BPFs.
Table 2 represents the average values of 50 identification results obtained by using Monte-Carlo methods. In
Table 2, we present the identification accuracy by the relative error between real parameter
and estimated one
, i.e.,
Table 2. The Identification Result According to Various Noise and Numbers of BPFs.
linear parameter | true | BPFs' number =100 | BPFs' number =500 |
SNR=10dB | SNR=20dB | SNR=50dB | SNR=10dB | SNR=20dB | SNR=50dB |
| 1.1 | 1.1313 | 1.0898 | 1.1001 | 1.0986 | 1.0998 | 1.1000 |
| 1.5 | 1.6241 | 1.4997 | 1.4999 | 1.5014 | 1.5001 | 1.5000 |
| - | 6.88 | 0.54 | 7.6e-03 | 0.100 | 0.010 | 0.000 |
From
Table 2, we can see that the more increase the number of BPFs, the more improve the identification accuracy.
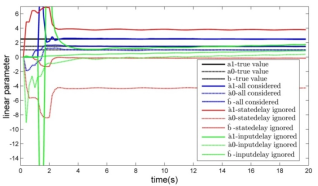
Figure 5 shows the online identification process of example 1 with ignored state delay or input delay. Here
and
.
Figure 5. The Dependence of Online Identification for Linear Parameters to Nonlinear Parameters.
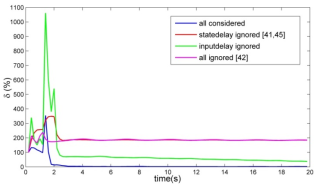
Figure 6. The Dependence of Error Function to Nonlinear Parameters.
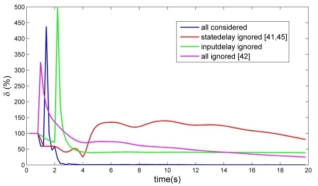
In order to analyse the identification accuracy in more detail, we present the dependence of the function (55) to the nonlinear parameters, see
Figure 6.
Figure 6 shows that for FOS with both state and input delays, identification result of linear parameters is greatly different from the one for FOS with only input delay
| [11] | Y. Tang, N. Li, M. Liu, Y. Lu, W. Wang, Identification of fractional-order systems with time delays using block pulse functions, Mechanical Systems and Signal Processing 91 (2017) 382-394. http://dx.doi.org/10.1016/j.ymssp.2017.01.008 |
| [28] | Myong-Hyok Sin, Chol Min Sin, Hyang-Yong Kim, Yong-Min An, Kum-Song Jang, Parameter identification of fractional-order systems with time delays based on a hybrid of orthonormal Bernoulli polynomials and block pulse functions, Nonlinear Dyn (2024) 112: 15109-15132.
https://doi.org/10.1007/s11071-024-09703-8 |
[11, 28]
, and without any delay
. In particular, the identification result is worse for FOS without state delay.
Example 2
We consider the system
(56)
where,is the Gauss white noise and.
Figure 7 shows the step response for the FOS (56) with noise or without noise.
Figure 7. The Step Response for Example 2.
To show the dependence of output response to input or state delays, we present
Figure 8.
Figure 8. The Step Response for Example 2 with Ignored State or Input Delay.
As example 1, the output response for the system with ignored state delay is greatly different from real response than the one for the system with ignored input delay. This also shows that the state delay is an important non-negligible factor.
Figure 9 shows the error function (44) for the FOS (56) without noise or with noise
when
. Here the errors for state delay
and input delay
is presented in the range of
.
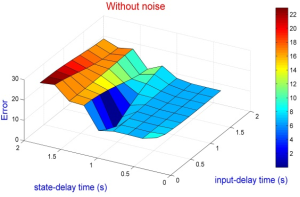
Figure 9. The Error Function for FOS (56).
From
Figure 9 we can see that the error function (44) for the FOS (56) is seldom affected by the output noise.
Table 3 presents the identification results of nonlinear parameters
for the FOS (56) with noise or without noise.
Table 3. Identification Results of Nonlinear Parameters for the FOS(56).
nonlinear parameter | true(s) | without noise | with noise |
SNR=10dB | SNR=20dB |
state delay time | 1.2 | 1.2000 | 1.2000 | 1.2000 |
input delay time | 0.8 | 0.8000 | 0.8000 | 0.8000 |
auxiliary parameter | 0.25 | 0.2500 | 0.2492 | 0.2501 |
Based on this identification result, we can estimate the linear parameters. Here we also use algorithm 2.
Figure 10 show the online identification process of linear parameters for the FOS (56) with noise or without noise.
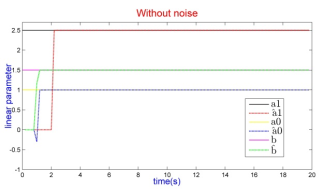
Figure 10. The Identification Result of Linear Parameters for FOS (56).
Table 4 lists the identification result according to various noise and numbers of BPFs by the average values of 50 identification results obtained by using Monte-Carlo methods.
Table 4. The Identification Result According to Various Noise and Numbers of BPFs.
linear parameter | true | BPFs' number =100 | BPFs' number =500 |
SNR=10dB | SNR=20dB | SNR=50dB | SNR=10dB | SNR=20dB | SNR=50dB |
| 2.5 | 2.3909 | 2.4872 | 2.4997 | 2.4984 | 2.4999 | 2.5000 |
| 1.0 | 0.9670 | 1.1012 | 1.0054 | 1.0007 | 1.0003 | 1.0002 |
| 1.5 | 1.6103 | 1.5136 | 1.5019 | 1.5012 | 1.5001 | 1.5000 |
| - | 5.1460 | 3.3388 | 1.7531 | 0.0687 | 0.0107 | 0.0064 |
From
Table 4, we can see that the more increase the number of BPFs, the more improve the identification accuracy.
Figure 11 shows the online identification process of example 2 with ignored state delay or input delay. Here
and
.
Figure 11. The Dependence of Online Identification of Linear Parameters to Nonlinear Parameters.
In
Figure 12 the dependence of the function (55) to the nonlinear parameters is presented.
Figure 12. The Dependence of Error Function to Nonlinear Parameters.
From
Figure 12 we can see that for linear continuous FOS, the identification accuracy of linear parameters is affected strongly by state delay than input delay and is nearly similar for the case of ignoring only state delay and the case of ignoring both state and input delay. Hence the state delay time must be estimated for linear continuous FOS with state delay.
Appendix
Appendix I: Proof of Eq. (16) At first, let us prove i) in Eq. (
16). Let
. Then
By Eq. (
15) we have
. Hence the matrix
is represented as
(58)
By Eq. (
13), Eq. (
58) can be rewritten as
where
,
. Thus Eq. (
57) holds.
For, we can follow the same argument to get
where
(60)
By Eqs. (
57) and (
59) we have
and
.
It suffices to prove only
for verifying ii) in Eq. (
16). That
is obvious by Eq. (
60).
The validity of iii) in Eq. (
16) follows immediately from ii).
Appendix II: Proof of Eq. (18) Here we prove Eq. (
18). We have
On the other hand,
by Eq. (
17). Thus Eq. (
18) is valid.
Appendix III: Proof of Eq. (30) Here we prove Eq. (
30). For simplicity, we set
. Direct calculations show that
Using the result from Appendix A, we have for
Now setting
we have
Denotingwe obtain that
In particular, there holds
On the other hand, setting
,
we have
and